|

|
윈도우 : 루트 디렉토리 바로 아래에 설치를 권장합니다. (예 : D:RBCodrone)
맥os : 패키지 처음 실행 시 Finder>다운로드>우클릭하여 실행을 권장합니다.


포트의 설치 여부는 장치 관리자>포트(COM&LPT) 탭에서 확인할 수 있습니다.
(맥의 경우 아두이노 실행>툴>포트 탭에서 확인 가능)

위의 다운로드에서 문제가 발생한 경우
웹사이트를 통해 USB드라이버를 직접 다운로드 할 수 있습니다.



















|

|
|
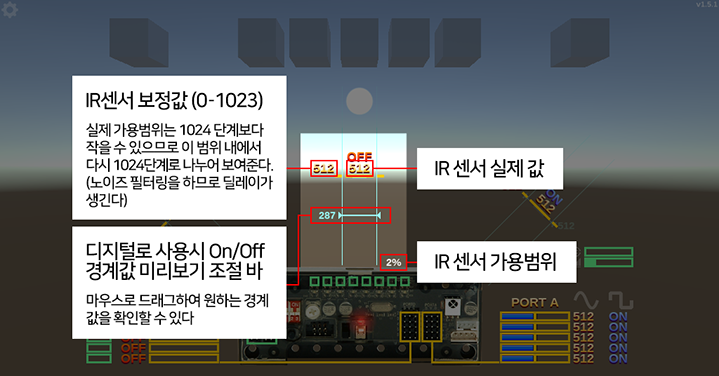
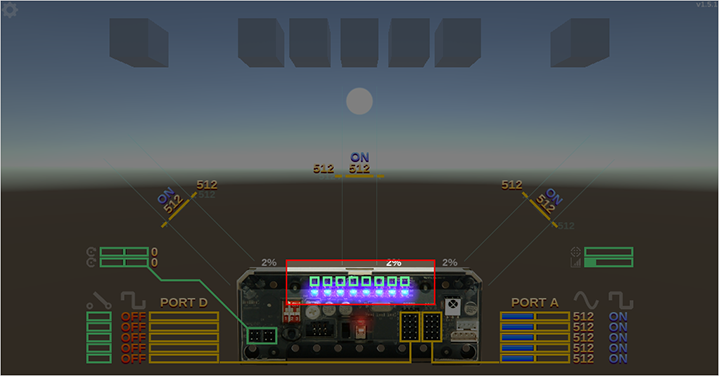
IR센서를 가리는 거리에 따라 벽의 높이가 달라진다. |
중앙 IR센서를 잠시 막고 있으면 공이 리셋된다. |



|
아날로그 센서지만 일정 범위를 기준으로 디지털 On/Off로 작동한다. |



|
보드를 뒤집어 잡고 빠르지 않은 적당한 속도로 수리검을 던지 듯 손가락을 밀어낸다. |



|
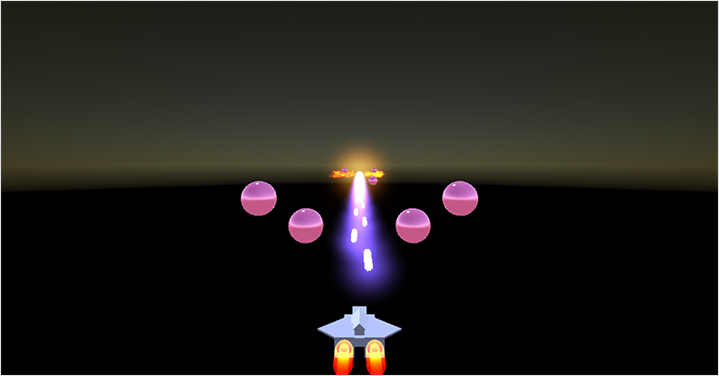
예시 센서를 모두 가리지 않으면 전진 양쪽 두 센서를 모두 가리면 후진 왼쪽 센서를 가리면 좌회전 오른쪽 센서를 가리면 우회전 |



|
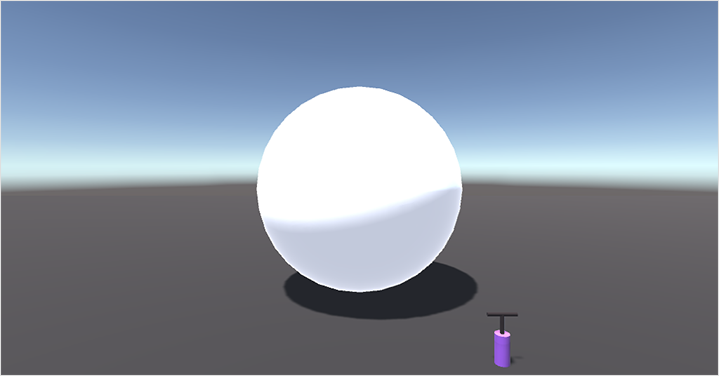
왼쪽 손가락을 가로로 세워 디지털 센서에 대고 오른손으로 보드를 수직으로 잡고 펌프질 하듯 상하로 움직여준다. (왼손가락은 고정!) |


|
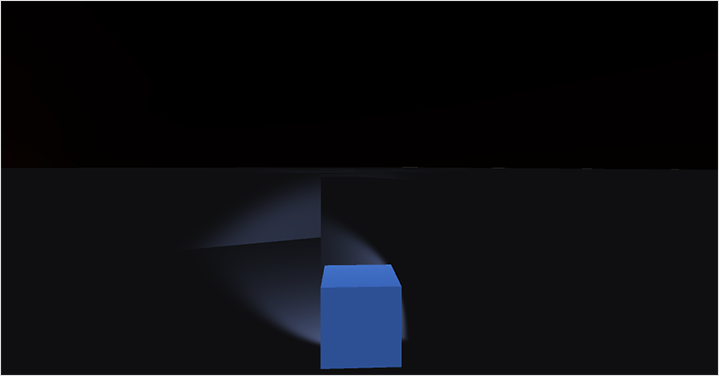
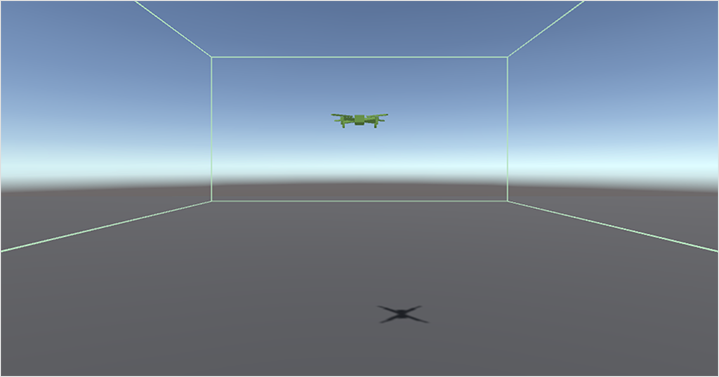
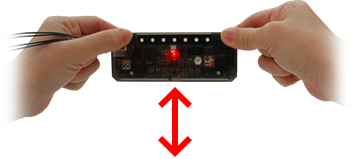
보드의 중앙 IR 센서가 바닥을 볼 수 있게 아랫쪽으로 향하도록 보드를 잡고 바닥과의 높이를 변경하여 드론의 상승하강을 조종한다 |
|
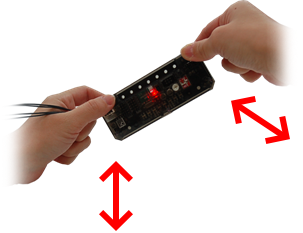
이 상태에서 보드를 좌우로 기울여 양쪽 IR 센서가 바닥과의 거리를 인식해 드론이 좌우로 움직일 수 있게 한다. |

|
뒷 면 양쪽 끝 두 개의 디지털 센서는 각각 전진 후진을 담당한다. |

|
중앙의 디지털 센서는 멀리 이동한 드론을 다시 제자리로 돌아오게 하는 역할을 한다. |



|
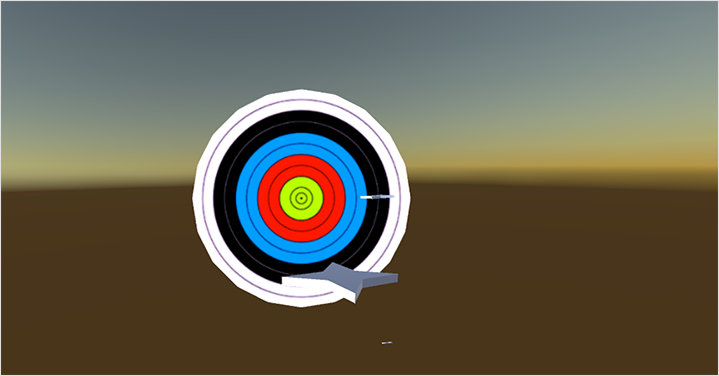
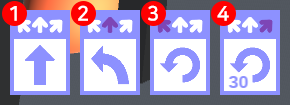
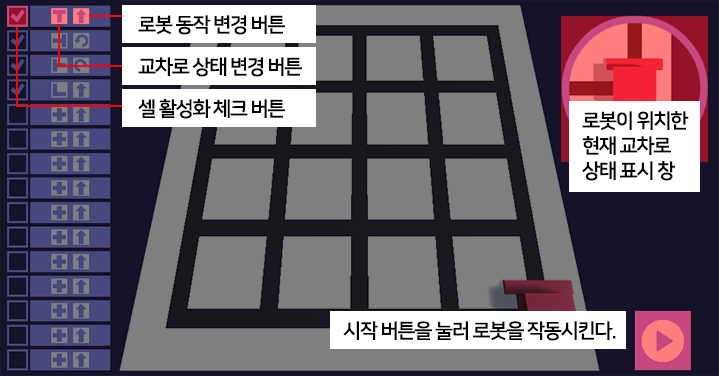
예시 1. 모든 센서가 감지되지 않았다면 전진 2. 가운데 센서가 감지되었다면 좌측 선회 3. 왼쪽 센서가 감지되었다면 반시계 방향으로 회전 4. 오른쪽 센서가 감지되었다면 반시계 방향으로 30도 회전(단, 30도 회전 완료시 까지의 센서 상태는 무시한다) |


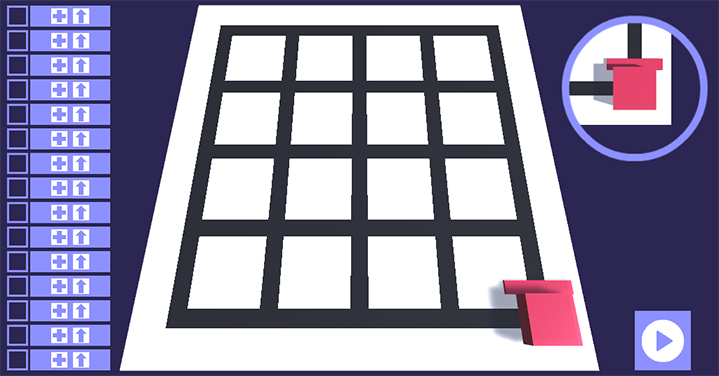
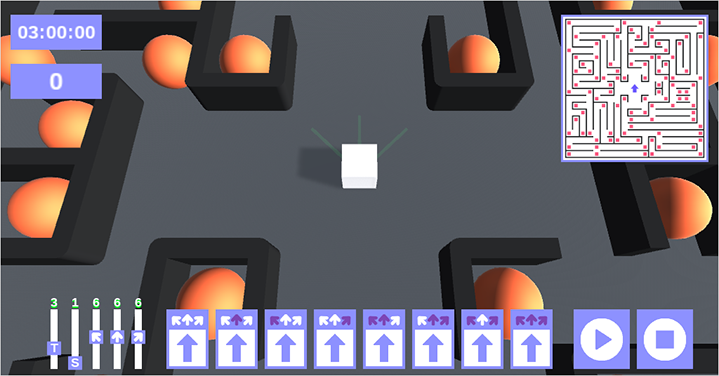
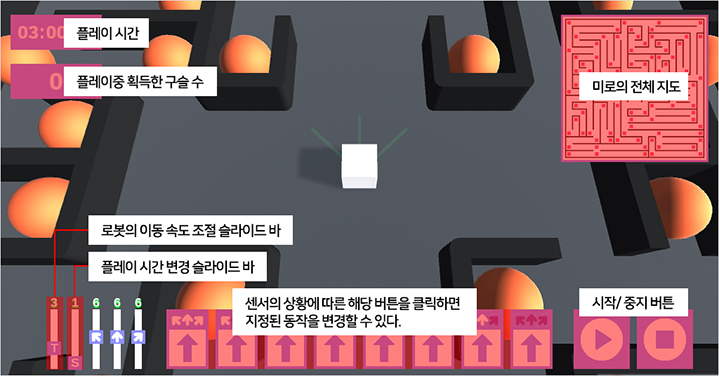
장애물 감지 센서의 감지 상황에 따라 해당 동작을 지정하여 로봇이 미로를 막힘 없이 누비고 다닐 수 있도록 프로그래밍 한다.


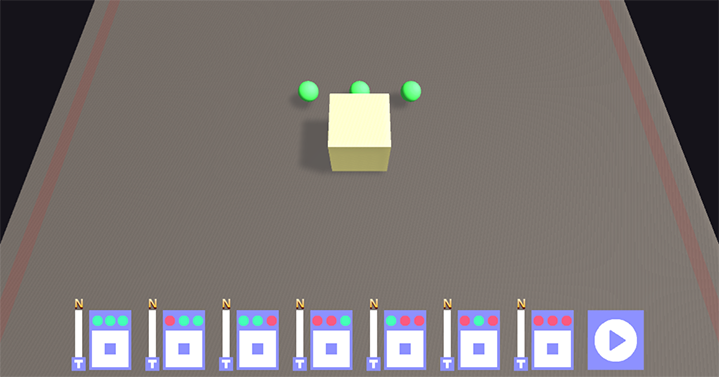
낭떠러지 감지 센서의 감지 상황에 따라 해당 동작을 지정하여 로봇이 판넬 위에서 떨어지지 않고 자유롭게 움직일 수 있도록 프로그래밍 한다.

|
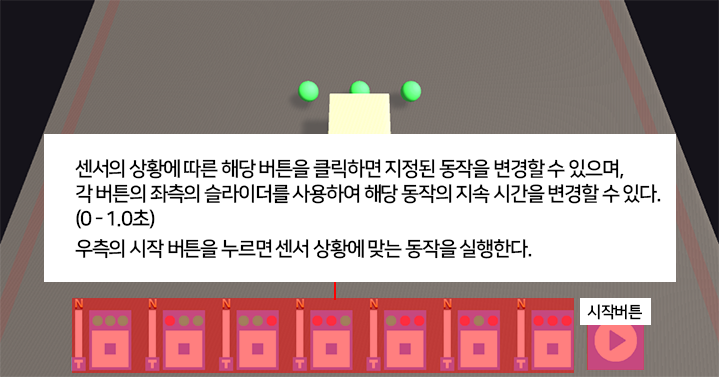
예시 1. 모든 센서가 감지되지 않았다면 전진 2. 왼쪽 센서가 감지되었다면 0.5초간 후진 3. 오른쪽 센서가 감지되었다면 0.3초간 반시계 방향으로 회전 4. 가운데 센서와 왼쪽 센서가 감지되었다면 0.4초간 시계방향으로 돌면서 후진 5. 가운데 센서와 오른쪽 센서가 감지되었다면 1초간 랜덤으로 정해진 방향으로 돌면서 후진 |


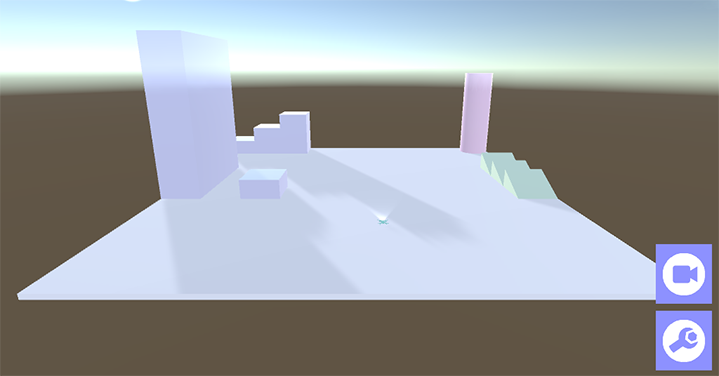
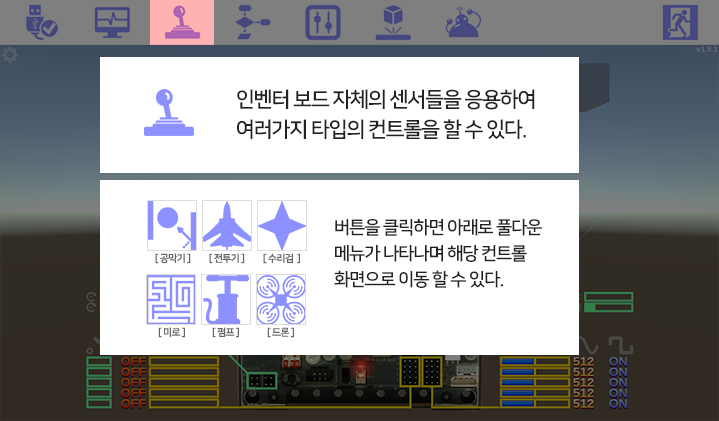
직접 환경을 꾸며보고 인벤터 보드와의 구동방식을 설정해보는 로봇 시뮬레이션 환경


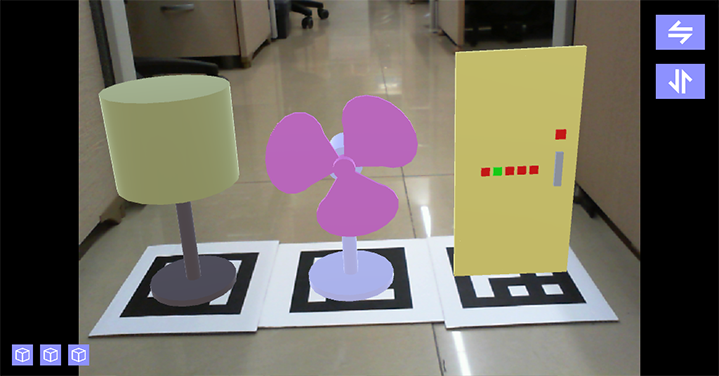
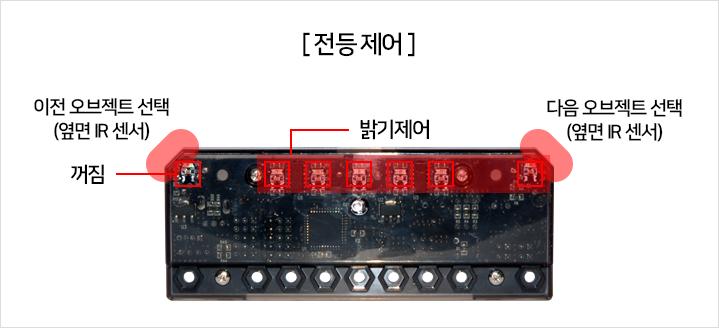
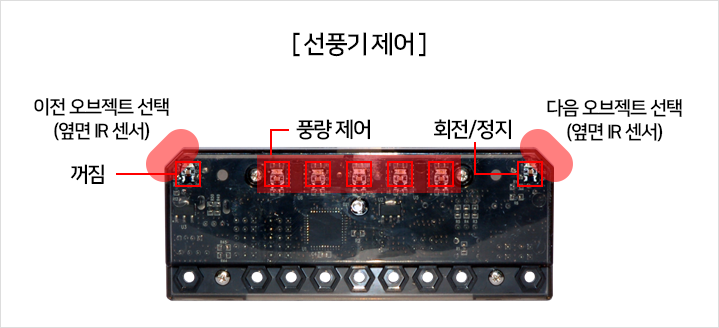
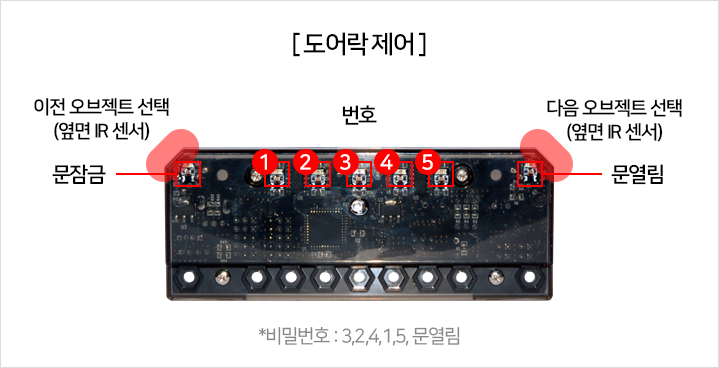
증강현실 속의 기기들을 인벤터 보드를 사용하여 제어한다.
마커 이미지를 다운로드 받아 프린트한 뒤 PC 웹캠을 사용하여 영상에 비추면 가상의 기기들이 영상에 나타난다.