









For a detailed description of the functions used in the example,
please see the Library landing page below.


#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set the drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(ConnectedDrone); // Connect to a drone with the same address of the latest drone connected before
CoDrone.DroneModeChange(Flight); // Set the drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
//CoDrone.PrintDroneAddress(); // Display the address of recently connected drone, on the serial monitor
byte droneAddress[6] = {0xFC, 0xA6, 0x61, 0x78, 0xD5, 0xA4};
// Enter address – check with PrintDroneAddress() command)
CoDrone.AutoConnect(AddressInputDrone, droneAddress); // Connect to a drone having same address entered above
CoDrone.DroneModeChange(Flight); // Set the drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.lightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.PrintDroneAddress(); // Display the address of recently connected drone, on the serial monitor
}
void loop()
{
}

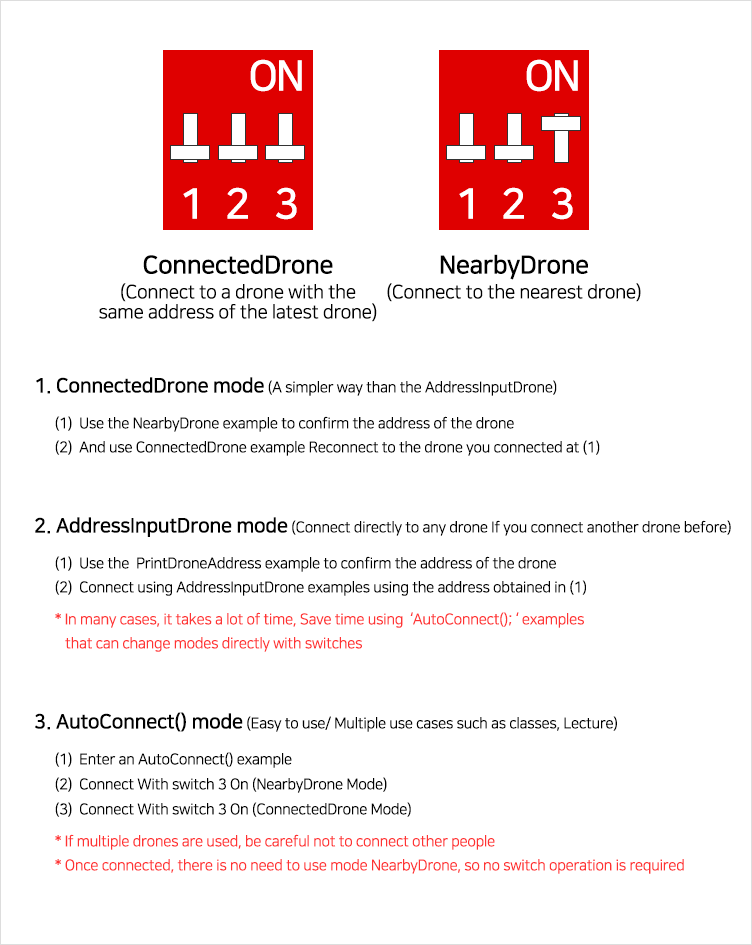
- Mixed connection mode NearbyDrone and ConnectedDrone
- At power-on, the connection mode is set by the switch Status
#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(); // AutoConnect drones according to Dip switch 3
CoDrone.DroneModeChange(Flight); // Set the drone into flight mode (Flight type drone)
CoDrone.FlightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
void loop()
{
}


#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
THROTTLE = 100 // Enter THROTTLE value: 100=Ascend, -100=Descend
CoDrone.Control(); // Send Control value
delay(2000); // Waiting time
CoDrone.FlightEvent(Stop); // Stop
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
PITCH = 100; // Enter PITCH value
CoDrone.Control(); // Send Control value
delay(500); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
ROLL = 100; // Enter ROLL value
CoDrone.Control(); // Send Control value
delay(1000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(2000); // Waiting time
YAW = 100; // Enter Yaw value
CoDrone.Control(); // Send Control value
delay(1000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
delay(300); // Waiting time
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TurnOver); // Flip
delay(4000); // Running time
CoDrone.FlightEvent(Stop); // Stop
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
}
void loop()
{
byte bt1 = digitalRead(11); // ■ □ □ □ □ □ □ Use infrared sensors at bottom as input
byte bt4 = digitalRead(14); // □ □ □ ■ □ □ □ Use infrared sensors at bottom as input
byte bt8 = digitalRead(18); // □ □ □ □ □ □ ■ Use infrared sensors at bottom as input
if (bt1 && !bt4 && !bt8) // Run when placing hand on sensor #11 of the board
{
CoDrone.FlightEvent(Stop); // Stop the drone
}
if (!bt1 && !bt4 && bt8) // Run when placing hand on sensor #18 of the board
{
CoDrone.FlightEvent(Landing); // Land the drone
}
if (PAIRING == true) // Run only when pairing succeeds
{
YAW = -1 * CoDrone.AnalogScaleChange(analogRead(A3));
// Set value of analog pin #3 as YAW value - Spin Left·Right
THROTTLE = CoDrone.AnalogScaleChange(analogRead(A4));
// Set value of analog pin #4 as THROTTLE value - Ascend·Descend
ROLL = -1 * CoDrone.AnalogScaleChange(analogRead(A5));
// Set value of analog pin #5 as ROLL value - Move Left·Right
PITCH = CoDrone.AnalogScaleChange(analogRead(A6));
// Set value of analog pin #6 as PITCH value - Move Forward·Backward
CoDrone.Control(SEND_INTERVAL);
// Send control signal. For stable communication, sending takes some time. (At least 50ms)
}
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Drive); // Set drone into drive mode (Wheel type drone)
}
void loop()
{
byte bt1 = digitalRead(11); // ■ □ □ □ □ □ □ Use infrared sensors at bottom as input
byte bt4 = digitalRead(14); // □ □ □ ■ □ □ □ Use infrared sensors at bottom as input
byte bt8 = digitalRead(18); // □ □ □ □ □ □ ■ Use infrared sensors at bottom as input
if (PAIRING == true) // Run only when pairing succeeds
{
THROTTLE = CoDrone.AnalogScaleChange(analogRead(A4));
// Set value of analog pin #4 as THROTTLE value - Ascend·Descend
ROLL = -1 * CoDrone.AnalogScaleChange(analogRead(A5));
// Set value of analog pin #5 as ROLL value - Move Left/Right
CoDrone.Control(SEND_INTERVAL);
// Send control signal. For stable communication, sending takes some time. (At least 50ms)
}
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
CoDrone.BattleBegin(FREE_PLAY); // Select Team : TEAM_RED/TEAM_BLUE/TEAM_GREEN/TEAM_YELLOW/FREE_PLAY
}
void loop()
{
CoDrone.BattleReceive(); // Receive IR-Data
byte bt1 = digitalRead(11); // ■ □ □ □ □ □ □ Use infrared sensors at bottom as input
byte bt4 = digitalRead(14); // □ □ □ ■ □ □ □ Use infrared sensors at bottom as input
byte bt8 = digitalRead(18); // □ □ □ □ □ □ ■ Use infrared sensors at bottom as input
if (bt1 && !bt4 && !bt8) // Run when placing hand on sensor #11 of the board
{
CoDrone.FlightEvent(Stop); // Emergency stop for the drone
}
if (!bt1 && !bt4 && bt8) // Run when placing hand on sensor #18 of the board
{
CoDrone.BattleShooting(); // Launch weapon
CoDrone.ButtonPreesHoldWait(18); // Wait until the button is released.(Prevent rapid fire)
}
if (!bt1 && bt4 && !bt8) // Run when placing the hand on the sensor at the center of the board
{
CoDrone.FlightEvent(Landing); // Landing slowly
}
YAW = -1 * CoDrone.AnalogScaleChange(analogRead(A3));
// / Set value of analog pin #3 as YAW value - Spin Left·Right
THROTTLE = CoDrone.AnalogScaleChange(analogRead(A4));
// Set value of analog pin #4 as THROTTLE value - Ascend·Descend
ROLL = -1 * CoDrone.AnalogScaleChange(analogRead(A5));
// Set value of analog pin #5 as ROLL value - Move Left·Right
PITCH = CoDrone.AnalogScaleChange(analogRead(A6));
// Set value of analog pin #6 as PITCH value - Move Forward/Backward
CoDrone.Control(SEND_INTERVAL);
// Send control signal. For stable communication, sending takes some time. (At least 50ms)
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
}
void loop()
{
byte bt1 = digitalRead(11); // ■ □ □ □ □ □ □ Use infrared sensors at bottom as input
byte bt4 = digitalRead(14); // □ □ □ ■ □ □ □ Use infrared sensors at bottom as input
byte bt8 = digitalRead(18); // □ □ □ □ □ □ ■ Use infrared sensors at bottom as input
if ((analogRead(A4) < 50) && (analogRead(A6) < 50)) // Run when pulling down both side of the joystick
{
CoDrone.FlightEvent(Stop); // Stop the drone (Emergency Stop)
// CoDrone.FlightEvent(Landing); // Stop the drone (Landing Slowly)
}
if (PAIRING == true) // Run only when pairing succeeds
{
YAW = -1 * CoDrone.AnalogScaleChange(analogRead(A3));
// Set value of analog pin #3 as YAW value - Spin Left·Right
THROTTLE = CoDrone.AnalogScaleChange(analogRead(A4));
// Set value of analog pin #4 as THROTTLE value - Ascend·Descend
ROLL = -1 * CoDrone.AnalogScaleChange(analogRead(A5));
// Set value of analog pin #5 as ROLL value - Move Left·Right
PITCH = CoDrone.AnalogScaleChange(analogRead(A6));
// Set value of analog pin #6 as PITCH value - Move Forward·Backward
CoDrone.Control(SEND_INTERVAL);
// Send control signal. For stable communication, sending takes some time. (At least 50ms)
}
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
CoDrone.GoToHeight(800); // move to the height 800mm(80cm) (Input range : 1 ~ 2000 (Unit : mm))
delay(1000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
CoDrone.FlightEvent(TakeOff); // Take-off
delay(3000); // Waiting time
CoDrone.TurnDegree(90); // Rotate Right 90 degrees
delay(1000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
void loop()
{
}


#include <CoDrone.h> // Header file for using CoDrone
byte modeTime = 7; // Variable : Mode time
int delayTime = 1000; // Variable : Waiting time
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
}
void loop()
{
CoDrone.LedColor(ArmDimming, Yellow, modeTime);
// Set LED light into slowly blinking yellow light during mode time
delay(delayTime); // Waiting time
CoDrone.LedColor(ArmDimming, Cyan, modeTime);
// Set LED light into slowly blinking cyan light during mode time
delay(delayTime); // Waiting time
}

#include <CoDrone.h> // Header file for using CoDrone
byte modeTime = 7; // Variable : Mode time
int delayTime = 1000; // Variable : Waiting time
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
}
void loop()
{
CoDrone.LedColor(ArmDimming, 255, 0, 0, modeTime);
// Set LED into slowly blinking light with entered RGB color during mode time delay(delayTime);
delay(delayTime); // Waiting time
CoDrone.LedColor(ArmDimming, 0, 255, 0, modeTime);
// Set LED into slowly blinking light with entered RGB color during mode time delay(delayTime);
delay(delayTime); // Waiting time
CoDrone.LedColor(ArmDimming, 0, 0, 255, modeTime);
// Set LED into slowly blinking light with entered RGB color during mode time delay(delayTime);
delay(delayTime); // Waiting time
CoDrone.LedColor(ArmDimming, 0, 0, 0, modeTime);
// Set LED into slowly blinking light with entered RGB color during mode time delay(delayTime);
delay(delayTime); // Waiting time
}

#include <CoDrone.h> // Header file for using CoDrone
byte modeTime = 7; // Variable : Mode time
int delayTime = 1000; // Variable : Waiting time
byte color0[] = {255, 0, 0}; // color0 color arrangement (R, G, B)
byte color1[] = {0, 255, 0}; // color1 arrangement (R, G, B)
byte color2[] = {0, 0, 255}; // color2 arrangement (R, G, B)
byte color3[] = {0, 0, 0}; // color3 arrangement (R, G, B)
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NeardbyDrone); // Connect to the nearest drone
}
void loop()
{
CoDrone.LedColor(ArmDimming, color0, modeTime);
// Set LED into slowly blinking light with color0’s color during mode time delay(delayTime);
delay(delayTime); // Waiting time
CoDrone.LedColor(ArmDimming, color1, modeTime);
// Set LED into slowly blinking light with color1’s color during mode time delay(delayTime);
delay(delayTime); // Waiting time
CoDrone.LedColor(ArmDimming, color2, modeTime);
// Set LED into slowly blinking light with color2’s color during mode time delay(delayTime);
delay(delayTime); // Waiting time
CoDrone.LedColor(ArmDimming, color3, modeTime);
// Set LED into slowly blinking light with color3’s color during mode time delay(delayTime);
delay(delayTime); // Waiting time
}

#include <CoDrone.h> // Header file for using CoDrone
byte mode1 = ArmHold;
byte color1[] = {0, 0, 255}; //color1 arrangement (R, G, B)
byte modeTime1 = 255; // Variable : Mode time
byte mode2 = EyeHold;
byte color2[] = {255, 255, 0}; //color2 arrangement (R, G, B)
byte modeTime2 = 255; // Variable : Mode time
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.LedColorDefault(mode1, color1, modeTime2, mode2, color2, modeTime2);
// Operates depending on mode, mode time, and entered color
}
void loop()
{
}


#include <CoDrone.h> // Header file for using CoDrone
byte level = 50; // Reference value sets here
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.LowBatteryCheck(level); // If battery has lower power than reference value, sound the buzzer to alarm
}
void loop()
{
}

#include <CoDrone.h>
void setup()
{
CoDrone.begin(115200);
CoDrone.AutoConnect(NearbyDrone);
delay(500);
}
void loop()
{
AttitudeToSerialMonitor();
delay(500);
}
void AttitudeToSerialMonitor()
{
//---------------------------------------------------------------------------------------------//
CoDrone.Send_LinkModeBroadcast(LinkBroadcast_Active); // link module mode change => Active
delay(100);
CoDrone.Request_DroneAttitude();
long oldTime = millis();
boolean attitudeSuccess = false;
CoDrone.receiveAttitudeSuccess = 0; //receiveAttitudeSuccess flag init
while (attitudeSuccess == false) // receiveAttitudeSuccess check
{
CoDrone.Receive();
if (CoDrone.receiveAttitudeSuccess == 1) attitudeSuccess = true;
if (oldTime + 1000 < millis()) break;
}
//---------------------------------------------------------------------------------------------//
if (attitudeSuccess == true)
{
CoDrone.Send_LinkModeBroadcast(LinkModeMute); // link module mode change => Mute
delay(300);
Serial.println("");
Serial.println("--------- Now attitude -----------");
Serial.print("ROLLt");
Serial.println(AttitudeROLL);
Serial.print("PITCHt");
Serial.println(AttitudePITCH);
Serial.print("YAWt");
Serial.println(AttitudeYAW);
delay(500);
}
//---------------------------------------------------------------------------------------------//
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DisplayRSSI(); // Represent the drone’s RSSI value by LED
}

#include <CoDrone.h> // Header file for using CoDrone
int scale = 200; // Criteria altitude of one LED is 200mm
int firstLEDpin = 11; // First LED pin number on the Smart Board
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
delay(500);
for (int thisPin = 11; thisPin
<=1 8; thisPin++) {
pinMode(thisPin, OUTPUT);
}
for (int thisPin = 11; thisPin
<=1 8; thisPin++) {
digitalWrite(thisPin, LOW);
}
}
void loop()
{
CoDrone.Request_Range();
long oldTime = millis();
while (CoDrone.receiveRangeSuccess) //receiveRangeSuccess check
{
CoDrone.Receive();
if (oldTime + 1000 < millis()) break;
}
if (CoDrone.receiveRangeSuccess == true)
{
int _sensor = CoDrone.sensorRange[5] / scale;
if (_sensor
< 0 )_sensor=0 ;
if (_sensor > 7) _sensor = 7;
for (int thisPin = 11; thisPin
<=1 8; thisPin++) {
digitalWrite(thisPin, LOW);
}
digitalWrite(firstLEDpin, HIGH);
for (int i = 1; i
< _sensor ; i++)
{
digitalWrite(++firstLEDpin , HIGH);
}
}
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
delay(500);
}
void loop()
{
RangeSensorToSerialMonitor();
}
void RangeSensorToSerialMonitor()
{
//---------------------------------------------------------------------------------------------//
CoDrone.Send_LinkModeBroadcast(LinkBroadcast_Active); // link module mode change => Active
delay(100);
CoDrone.Request_Range();
long oldTime = millis();
while (CoDrone.receiveRangeSuccess == false) // receiveRangeSuccess check
{
CoDrone.Receive();
if (oldTime + 1000 < millis()) break; // time out check
}
//---------------------------------------------------------------------------------------------//
if (CoDrone.receiveRangeSuccess == true)
{
CoDrone.Send_LinkModeBroadcast(LinkModeMute); // link module mode change => Mute
delay(300);
Serial.println("");
Serial.println("--------------- Sensor ---------------");
Serial.print("range tt");
Serial.print(CoDrone.sensorRange[5]);
Serial.println(" mm");
Serial.println("-------------------------------------- ");
delay(500);
}
//---------------------------------------------------------------------------------------------//
}


#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
delay(300); // Waiting time
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(1000); // Waiting time
PITCH = 50; // Enter PITCH value
ROLL = 50; // Enter ROLL value
CoDrone.Control(); // Operate the drone with entered values
delay(1000); // Waiting time
PITCH = 50; // Enter PITCH value
ROLL = -50; // Enter ROLL value
CoDrone.Control(); // Operate the drone with entered values
delay(1000); // Waiting time
PITCH = -50; // Enter PITCH value
ROLL = -50; // Enter ROLL value
CoDrone.Control(); // Operate the drone with entered values
delay(1000); // Waiting time
PITCH = -50; // Enter PITCH value
ROLL = 50; // Enter ROLL value
CoDrone.Control(); // Operate the drone with entered values
delay(1000); // Waiting time
CoDrone.FlightEvent(Landing); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
delay(300); // Waiting time
if (PAIRING == true)
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(1000); // Waiting time
THROTTLE = 60; // Enter THROTTLE value
//Rotate 4 times to 90 degrees fan shape
for(int i=0;i<4;i++)
{
THROTTLE = THROTTLE - 10; // Enter THROTTLE value
YAW = -80; // Enter YAW value
ROLL = 50; // Enter ROLL value
CoDrone.Control(); // Send Control value
delay(1500); // Waiting time
}
CoDrone.FlightEvent(Stop); // Stop
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
if (PAIRING == true) // Run only when pairing succeeds
CoDrone.FlightEvent(TakeOff); // Take-off
delay(1000); // Waiting time
PITCH = 30; // Enter PITCH value
CoDrone.Control(); // Send Control value
delay(300); // Waiting time
CoDrone.FlightEvent(Stop); // Landing slowly
}
}
void loop()
{
}

#include <CoDrone.h> // Header file for using CoDrone
void setup() {
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
delay(400); // Waiting time
if (PAIRING == true) // Run only when pairing succeeds
{
CoDrone.FlightEvent(TakeOff); // Take-off
delay(1000); // Waiting time
// Ascend
THROTTLE = 20; // Enter THROTTLE value
CoDrone.Control(); // Send Control value
delay(500); // Waiting time
// Move forward
THROTTLE = 0; // Enter THROTTLE value
PITCH = 100; // Enter PITCH value
ROLL = -10; // Enter ROLL value
CoDrone.Control(); // Send Control value
delay(300); // Waiting time
// Fly in place
THROTTLE = 0; // Enter THROTTLE value
PITCH = 0; // Enter PITCH value
ROLL = 0; // Enter ROLL value
CoDrone.Control(); // Send Control value
delay(500); // Waiting time
CoDrone.FlightEvent(Landing); // Landing
}
}
void loop() {
}

#include <CoDrone.h> // Header file for using CoDrone
void setup()
{
CoDrone.begin(115200); // Initiate communication of BLE Board (115200bps)
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
}
void loop()
{
byte bt1 = digitalRead(11); // ■ □ □ □ □ □ □ Use infrared sensors at bottom as input
byte bt4 = digitalRead(14); // □ □ □ ■ □ □ □ Use infrared sensors at bottom as input
byte bt8 = digitalRead(18); // □ □ □ □ □ □ ■ Use infrared sensors at bottom as input
int analogValue0 = analogRead(A0); // Connect Analog sensor to the control value (Throttle, Pitch, or Roll) that you want
int analogValue1 = analogRead(A1); // Connect Analog sensor to the control value (Throttle, Pitch, or Roll) that you want
int analogValue2 = analogRead(A2); // Connect Analog sensor to the control value (Throttle, Pitch, or Roll) that you want
if (bt1 && !bt4 && !bt8) // Run when placing hand on sensor #11 of the board
{
CoDrone.FlightEvent(Stop); // Stop the drone
}
if (bt4) // Run when placing a hand on sensor #14 which is at the bottom center of the board
{
THROTTLE = map(analogValue1, 0, 1023, -50, 200); // Ascend·Descend
ROLL = map(analogValue0, 0, 1023, 100, 0) + map(analogValue2, 0, 1023, -100, 0); // Move Left·Right
CoDrone.Control(SEND_INTERVAL); // Send control signal. Sending takes some time (At least 50ms)
}
if (bt8) // Run when placing hand on sensor #18 of the board
{
THROTTLE = map(analogValue1, 0, 1023, -50, 200); // Ascend·Descend
PITCH = map(analogValue0, 0, 1023, -100, 0) + map(analogValue2, 0, 1023, 100, 0); // Move Forward·Backward
CoDrone.Control(SEND_INTERVAL); // Send control signal. Sending takes some time (At least 50ms)
}
}

#include <CoDrone.h> // Header file for using CoDrone
int slowUp = 80; // Value of slow hovering ascent
int slowDown = -100; // Value of slow hovering descent
int slowTime = 10; // Control the slow moving speed: moves slower when the value gets bigger
void setup()
{
CoDrone.begin(115200);
CoDrone.AutoConnect(NearbyDrone); // Connect to the nearest drone
CoDrone.DroneModeChange(Flight); // Set drone into flight mode (Flight type drone)
delay(300);
// Use all bottom sensors as inputs
pinMode(11, INPUT);
pinMode(12, INPUT);
pinMode(13, INPUT);
pinMode(14, INPUT);
pinMode(15, INPUT);
pinMode(16, INPUT);
pinMode(17, INPUT);
pinMode(18, INPUT);
delay(100);
}
void loop()
{
byte bt1 = digitalRead(11);
byte bt2 = digitalRead(12);
byte bt3 = digitalRead(13);
byte bt4 = digitalRead(14); //14 & 15
byte bt6 = digitalRead(16);
byte bt7 = digitalRead(17);
byte bt8 = digitalRead(18);
//*************************** Slow Up ***************************//
// ■ □ □ □ □ □ □ Ascends slowly when placing hand on sensor #1
if (bt8 && !bt7 && !bt6 && !bt4 && !bt3 && !bt2 && !bt1)
{
THROTTLE = slowUp;
CoDrone.Control();
delay(slowTime);
THROTTLE = 0;
CoDrone.Control();
}
//*************************** Slow Down ***************************//
// □ □ □ □ □ □ ■ Descends slowly when placing hand on sensor #7
else if (!bt8 && !bt7 && !bt6 && !bt4 && !bt3 && !bt2 && bt1)
{
THROTTLE = slowDown;
CoDrone.Control();
delay(slowTime);
THROTTLE = 0;
CoDrone.Control();
}
//**************************** STOP ******************************//
// □ □ □ ■ □ □ □ Stops when placing hand on sensor #4
else if (bt4)
{
CoDrone.FlightEvent(Stop);
}
//**************************** Control ******************************//
// □ ■ □ □ □ □ □ Moves forward when placing hand on sensor #2
// Forward
else if (!bt8 && bt7 && !bt6 && !bt4 && !bt3 && !bt2 && !bt1)
{
PITCH = 40;
CoDrone.Control();
}
// □ □ □ □ □ ■ □ Moves backward when placing hand on sensor #6
// Back
else if (!bt8 && !bt7 && !bt6 && !bt4 && !bt3 && bt2 && !bt1)
{
PITCH = -40;
CoDrone.Control();
}
// □ □ ■ □ □ □ □ Moves left when placing hand on sensor #3
// Left
else if (!bt8 && !bt7 && bt6 && !bt4 && !bt3 && !bt2 && !bt1)
{
ROLL = -40;
CoDrone.Control();
}
// □ □ □ □ ■ □ □ Moves right when placing hand on sensor #5
// Right
else if (!bt8 && !bt7 && !bt6 && !bt4 && bt3 && !bt2 && !bt1)
{
ROLL = 40;
CoDrone.Control();
}
delay(10);
}
